
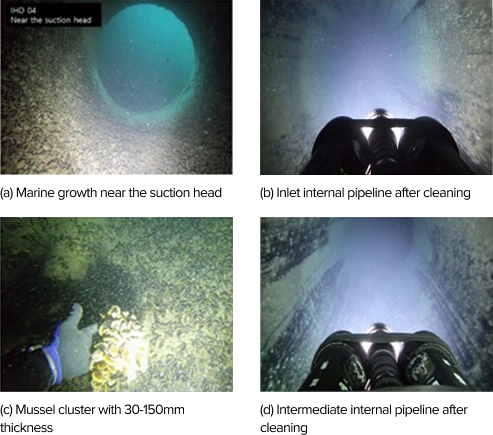
Seawater intake pipelines are mission-critical assets in oil & gas and industrial facilities. Continuous exposure to marine growth, sediment transport, and corrosion can reduce hydraulic efficiency and compromise structural integrity.
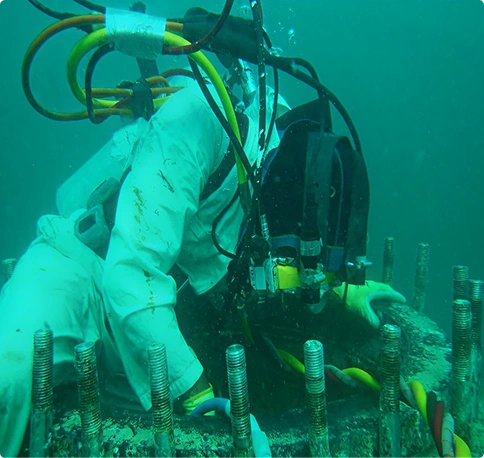
Traditionally, internal inspection relied on commercial divers operating in confined, submerged environments.
We replaced this high-risk approach with a controlled, engineering-driven inspection using the FIFISH W6 ROV — delivering high-resolution internal pipeline visibility, weld verification, and blockage detection without diver exposure.

These constraints increase operational risk and reduce inspection repeatability.
We deployed the FIFISH W6 industrial ROV for controlled internal pipeline inspection.
The ROV performs:
Instead of sending personnel into hazardous subsea environments, the ROV provides stable, repeatable, high-definition inspection from the surface control station.
An industrial-grade remotely operated vehicle engineered for confined subsea inspection.
The platform delivers controlled maneuverability and stable imaging inside submerged pipelines.

The inspection followed a structured engineering workflow:

All inspection data was archived for post-mission engineering review.

The documentation provided measurable, reviewable inspection evidence.

Zero diver exposure in confined subsea pipeline environments.
Reduced mobilization requirements and inspection preparation time.
Stable, high-resolution imaging unaffected by human fatigue.
Ability to re-inspect specific welds or obstruction zones.
Recorded visual proof supporting maintenance planning.
The ROV inspection provided controlled asset intelligence without operational disruption.


ROV-Based Internal Pipeline Inspection using the FIFISH W6 provides a safer, faster, and more controlled alternative to diver-based assessment.
It enables high-definition weld inspection, blockage detection, and sediment verification — without exposing personnel to confined underwater hazards.
This approach transforms subsea intake inspection into a measurable, documented, and engineering-driven asset integrity process.
Share your inspection challenges with us. We will design a controlled, ROV-based inspection solution that integrates seamlessly with your operational constraints and safety requirements.
